Репортаж от Wedoany,Китайская компания RealMan Robotics представила открытый набор данных RealSource, предназначенный для предоставления высококачественных мультимодальных обучающих данных для исследований в области управления роботами на основе ИИ, что позволит преодолеть проблему изолированности данных в отрасли. Набор данных основан на десяти реальных сценариях применения Пекинского центра обучения гуманоидных роботов, с акцентом на высокую точность данных и способность к обобщению в различных сценариях.

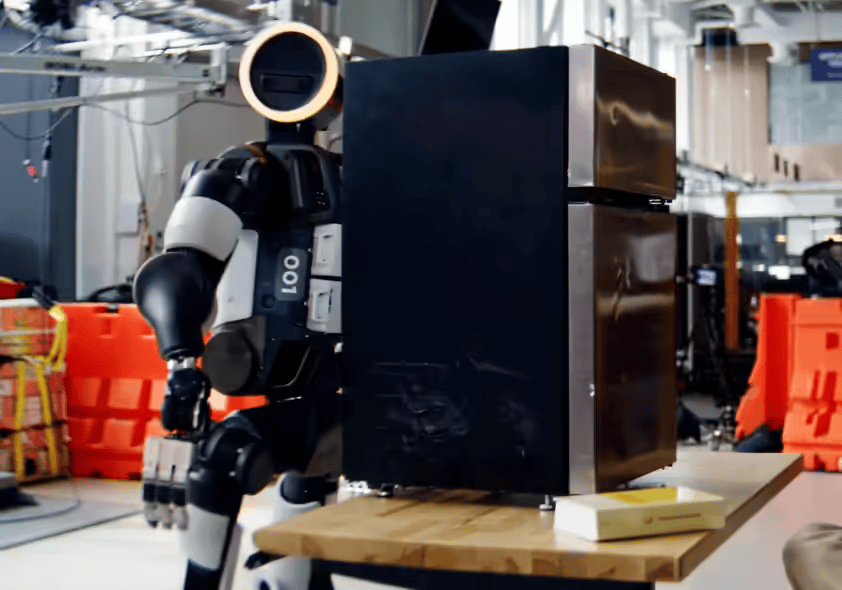
Набор данных получен из двух зон тренировочного центра площадью 3000 квадратных метров. В тренировочной зоне роботы выполняют базовые задачи по манипуляции; зона сценариев включает десять реальных сред применения, таких как умный дом и уход за пожилыми, повседневное использование, сельское хозяйство, розничная торговля, общественное питание и автомобильное производство, где роботы выполняют задачи, такие как открытие дверей холодильника, складывание одежды и сортировка материалов. Высокая точность, шумность и разнообразие среды выводят сбор данных за пределы лабораторных условий, ключевые показатели включают полноту модальностей 100%, помехоустойчивость 78% и плавность 82,1%.
Набор данных охватывает полный процесс восприятия, принятия решений и выполнения. Собранные данные включают RGB-изображения, углы и скорости суставов, шестиосевые силы, положение конечного эффектора, команды действий, временные метки и параметры камеры. Его особенности включают аппаратную пространственно-временную синхронизацию, чрезвычайно низкую частоту потери кадров (менее 0,5%), высокоточное управление движением суставов на миллисекундном уровне, заводскую калибровку для немедленного использования, обобщаемый сбор данных для задач в различных объектах и средах, а также отображение движений человека на робота в соотношении 1:1 с помощью экзоскелета.
Для сбора данных использовались три типа роботов. RS-01 — это мобильный робот с колесами и складным механизмом, оснащенный рукой с 20 степенями свободы и мультимодальным зрением. RS-02 — это двухрукий робот, подходящий для задач по переноске, с RGB- и глубинным зрением, каждая рука имеет 7 степеней свободы и полезную нагрузку 9 кг, сбор данных осуществляется с помощью шестиосевых датчиков силы и верхней камеры с рыбим глазом. RS-03 — это двухрукий прецизионный робот, оснащенный бинокулярной системой для высокоразрешающего стереозрения. Все роботы оснащены камерами на запястьях и голове с горизонтальным полем зрения 90 градусов и вертикальным полем зрения 65 градусов, а также полной пространственно-временной синхронизацией.
Манипуляторы Realman соответствуют пропорциям руки взрослого человека, номинальная нагрузка составляет 5 кг, максимальная нагрузка — 9 кг, скорость TCP — 1,8 м/с, энергопотребление — менее 100 Вт, среднее время наработки на отказ (MTBF) — 50 000 часов. RealMan Robotics планирует соединить исследования и промышленные приложения, выпуская набор данных RealSource в открытом доступе, и в будущем расширит набор данных, добавляя новые сценарии и режимы, чтобы построить открытую и взаимосвязанную экосистему.
Данный материал скомпилирован платформой Wedoany. При цитировании материалов, созданных с помощью искусственного интеллекта (ИИ), необходимо обязательно указывать источник — «Wedoany». В случае выявления нарушения прав или иных проблем просим своевременно информировать нас. Сайт оперативно внесёт изменения или удалит материал.Электронная почта: news@wedoany.com