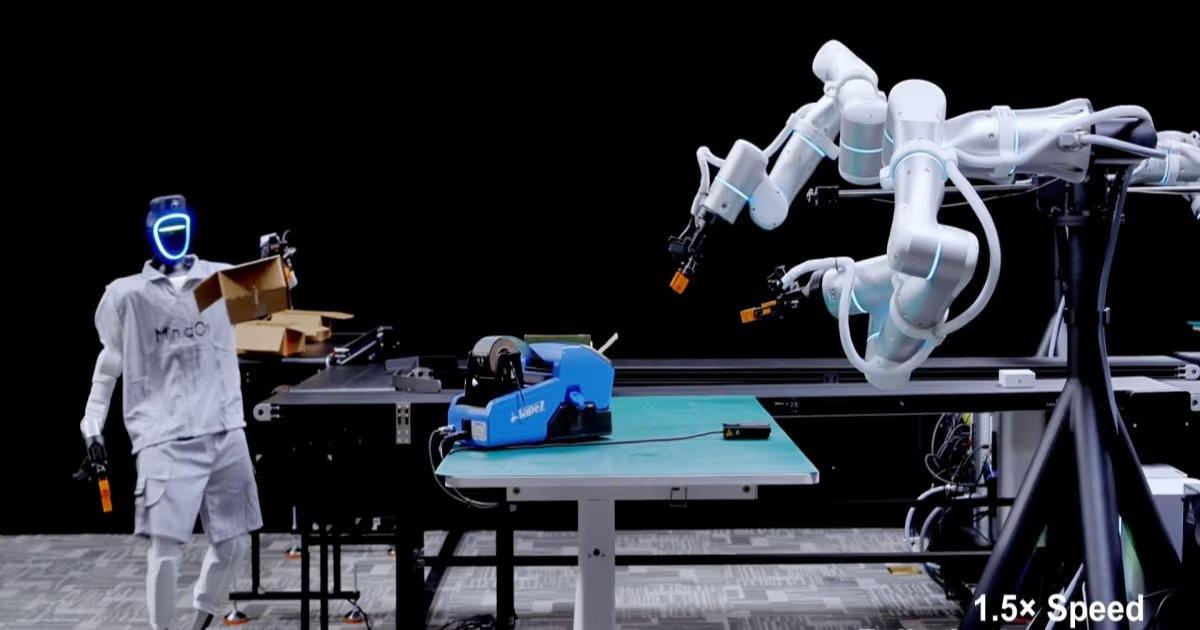
Репортаж от Wedoany,Китайский робототехнический стартап MindOn успешно продемонстрировал свою систему искусственного интеллекта Mind-0, способную одновременно управлять несколькими типами роботов в рамках единой логистической задачи. В ходе демонстрации человекоподобные роботы и стационарные манипуляторы работали совместно, используя единую модель ИИ, что свидетельствует о прогрессе компании в создании роботизированного интеллекта, не привязанного к конкретному оборудованию.
Ключевое новшество MindOn заключается в источнике обучающих данных. Компания не собирает данные путём ручного управления роботами, а использует данные захвата движений человека для обучения модели. Считается, что такой человекоцентричный метод обучения позволяет лучше сохранять естественные способности человека к решению задач. Для преобразования человеческих движений в движения роботов MindOn разработала кроссмодальный конвейер данных, который преобразует движения человека в представления, пригодные для различных робототехнических систем. Этот процесс поддерживается моделью движений всего тела, обученной на крупном наборе данных захвата движений, что позволяет роботам балансировать, координировать действия и выполнять задачи с учётом своих физических ограничений.
Для преодоления распространённой в робототехнике проблемы «переноса из симуляции в реальность» команда внедрила компенсационную модель для реального мира. Эта система использует небольшой объём данных, полученных при развёртывании в реальных условиях, для коррекции расхождений в производительности между симуляцией и физическим оборудованием. MindOn утверждает, что данная технология обеспечивает субсантиметровую точность операций на человекоподобной платформе Unitree G1. Кроме того, система включает модуль иерархического вывода, который компенсирует задержки механического исполнения путём непрерывного мониторинга обратной связи от контроллеров нижнего уровня и корректировки временных параметров команд в реальном времени, обеспечивая синхронизацию планирования и исполнения.
Недавно компания провела логистическую демонстрацию с использованием смешанной группы, состоящей из человекоподобного робота Unitree G1 и стационарного двухрукого манипулятора. Роботы совместно выполнили полный рабочий процесс: взятие груза, транспортировку, упаковку и запечатывание коробок. Несмотря на различные физические конфигурации, все роботы работали на основе одной и той же модели ИИ, что доказывает потенциал Mind-0 как универсального решения для многороботных платформ.
Компания MindOne Robotics, основанная в 2025 году в Шэньчжэне, позиционирует свою технологию как масштабируемую альтернативу традиционным решениям, основанным на дистанционном управлении. Компания планирует расширять человекоцентричный набор данных и распространить применение на различные формы роботов, включая мобильные двуручные системы. Её конечная цель — создать универсальный роботизированный интеллект, способный работать на множестве аппаратных платформ.
Данный материал скомпилирован платформой Wedoany. При цитировании материалов, созданных с помощью искусственного интеллекта (ИИ), необходимо обязательно указывать источник — «Wedoany». В случае выявления нарушения прав или иных проблем просим своевременно информировать нас. Сайт оперативно внесёт изменения или удалит материал.Электронная почта: news@wedoany.com