

Недавно новая алгоритмическая система ИИ RoboBallet, совместно разработанная Университетским колледжем Лондона, Google DeepMind и компанией Intrinsic, благодаря графическим нейронным сетям и технологии усиленного обучения позволяет крупным кластерам промышленных роботов осуществлять высокоскоростную совместную работу в сложных средах, сократив традиционное искусственное планирование пути, которое занимает сотни часов, до секунды. Исследование опубликовано в журнале Science Robotics.
Его основные технологические прорывы включают в себя:
Интеллектуальное совместное планирование: на основе архитектуры графовой нейронной сети, которая позволяет роботу абстрагировать препятствия окружающей среды в сетевые узлы для рассуждения и получать совместные стратегии посредством обучения с подкреплением
Возможность планирования в сверхреальном времени: через несколько дней обучения можно генерировать совместную схему с 40 задачами и 8 роботизированными руками за секунду, что в сотни раз быстрее, чем традиционные методы
Возможность обобщения сцены: одинаково эффективна для новых невиданных макетов, преодолевая ограничения традиционных алгоритмов, которые могут обрабатывать только конкретные сцены
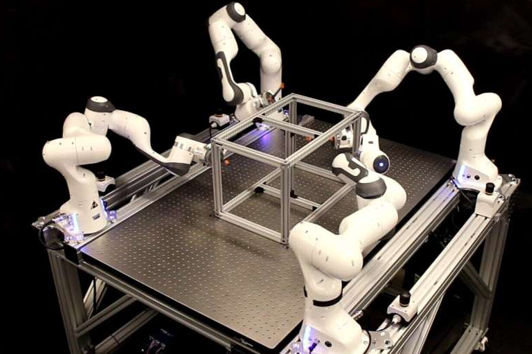
Согласно сообщению: Мэтью Лай, первый автор статьи и доктор компьютерных наук UCL, руководит командой, использующей структуру усиленного обучения для обучения роботизированной системы с помощью механизма « проб и ошибки — вознаграждение ». Система получает более высокие вознаграждения за выполнение более быстрых задач и, наконец, учится создавать эффективные планы пути без столкновений. Его графическая нейронная сетевая архитектура позволяет роботу понимать топологические отношения окружающей среды, а не механически запоминать конкретные сценарии. При отказе робота или изменении компоновки система может мгновенно перепланировать путь. «Координация нескольких манипуляторов на современных фабриках похожа на решение динамических трехмерных головоломок, а профессиональное ручное планирование занимает сотни часов. RoboBallet позволяет роботам достичь балетной элегантности с сверхчеловеческой точностью».