Репортаж от Wedoany,Корейский институт железнодорожных технологий запустил проект по разработке ключевых технологий осмотра путей на основе специализированных железнодорожных роботов. Планируется использовать виртуальную железнодорожную среду в качестве «динамического учебного полигона» для обучения роботов автономному безопасному осмотру.
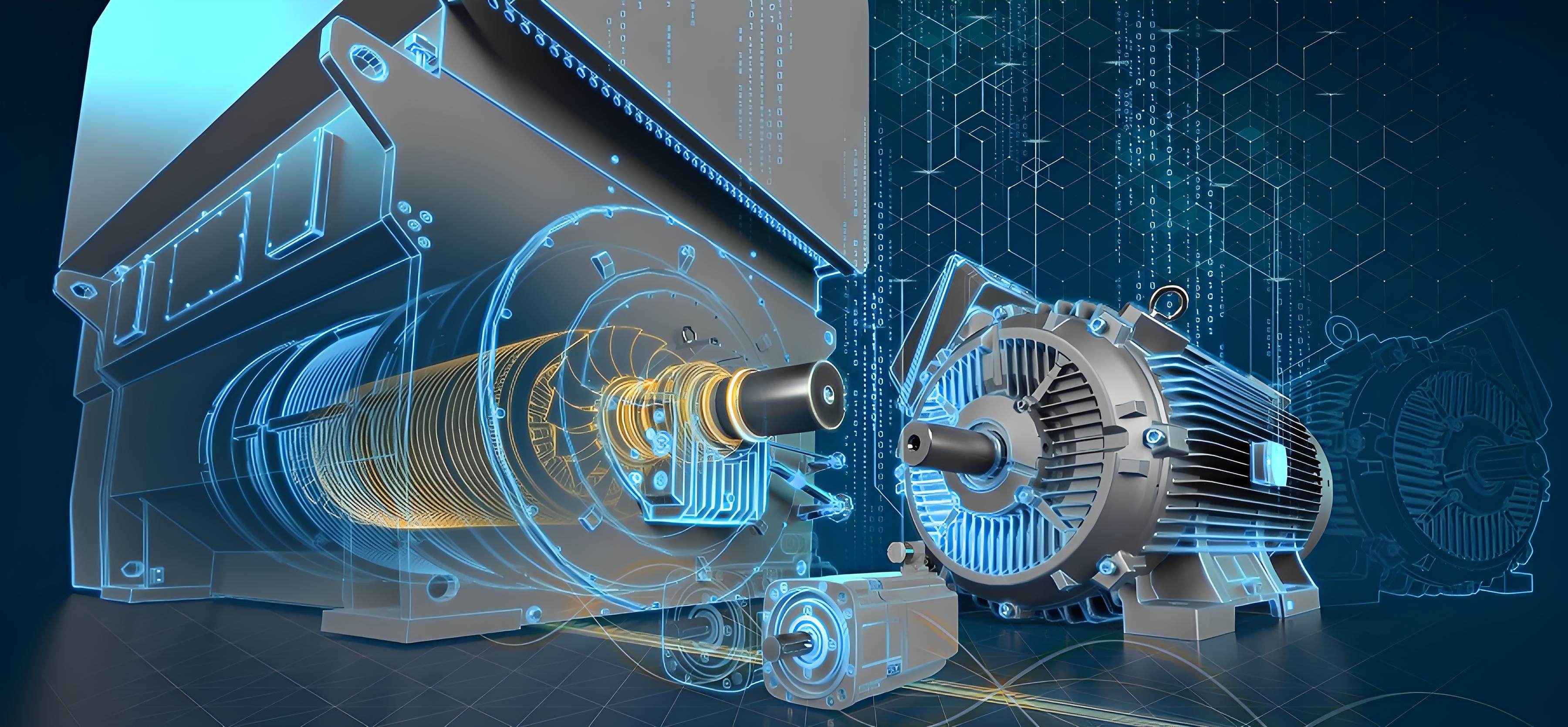
![Улучшение данных и преобразование доменов в железнодорожной среде на основе World Foundation Model. [Источник изображения = Корейский институт железнодорожных технологий]](https://img.wedoany.com/2026/0623/20260623050924826.jpg)
Проект был объявлен Корейским институтом железнодорожных технологий (Korea Railroad Research Institute, KRRI) 22-го числа. Ключевая цель — позволить автономным роботам-инспекторам многократно обучаться и испытывать различные состояния путей и опасные ситуации в виртуальной железнодорожной среде, созданной с помощью цифровых двойников, тем самым трансформируя традиционную систему обслуживания железных дорог, основанную на реагировании на инциденты, в систему превентивного и автономного осмотра.
Осмотр железнодорожных путей в настоящее время сталкивается с множеством комплексных проблем, включая риски для безопасности персонала, нехватку данных о редких дефектах и различия в результатах осмотра из-за разного уровня квалификации операторов. Малое количество реальных аварий или случаев дефектов затрудняет получение достаточных обучающих выборок для ИИ, а также проведение повторных экспериментов с опасными ситуациями на реальных объектах. Для преодоления этих ограничений институт планирует использовать дроны, камеры и лидары для сбора данных о реальных путях и окружающей среде, создания трехмерного виртуального пространства и использования его в качестве цифрового учебного полигона для тренировки визуального восприятия и управления движением роботов.
В виртуальном пространстве можно задавать внезапные переменные, такие как вторжение на пути и препятствия, а также погодные условия, такие как снегопады и ливни, условия окружающей среды, такие как ночь и встречный свет, а также рельеф, такой как щебень и склоны. Данные, полученные роботом в виртуальном пространстве, будут передаваться на действия физического робота и постоянно оптимизироваться в сочетании с данными реальной эксплуатации.
Руководитель проекта, старший научный сотрудник Корейского института железнодорожных технологий Пён Сон Джун (Byeon Seong-jun), отметил, что производительность автономного робота-инспектора зависит от его способности точно воспринимать окружающую обстановку и стабильно передвигаться. Ключевым аспектом данного исследования является использование World Foundation Model для улучшения визуального восприятия робота, а также применение обучения с подкреплением и технологии Sim2Real (от симуляции к реальности) для обеспечения стратегии управления, гарантирующей стабильное передвижение робота в реальной путевой среде.
Данный материал скомпилирован платформой Wedoany. При цитировании материалов, созданных с помощью искусственного интеллекта (ИИ), необходимо обязательно указывать источник — «Wedoany». В случае выявления нарушения прав или иных проблем просим своевременно информировать нас. Сайт оперативно внесёт изменения или удалит материал.Электронная почта: news@wedoany.com