

Репортаж от Wedoany,Джакомо Сассо (Giacomo Sasso), постдокторант Школы инженерии и материаловедения Лондонского университета королевы Марии, изобрёл тактильный датчик на основе механохромных материалов, который преобразует невидимые механические силы в динамические цветные узоры, обеспечивая мгновенное отображение карт контакта, деформации и давления с высоким разрешением. Команде удалось зафиксировать линии папиллярного узора, продемонстрировав сверхвысокое разрешение датчика.
При приложении давления к мягкой сенсорной поверхности материал генерирует пространственно изменяющуюся структурную окраску, которую можно фиксировать в реальном времени с помощью стандартной камеры без использования сложных алгоритмов реконструкции. Эта технология может применяться в прецизионном производстве для создания роботизированных захватов, способных тонко собирать микромасштабные компоненты, где каждое малейшее изменение силы визуализируется в реальном времени. В медицинской сфере внешние протезы смогут получать более богатые тактильные ощущения, а хирургические системы — считывать тонкие сигналы давления по цветовой реакции, помогая различать здоровые и аномальные ткани.
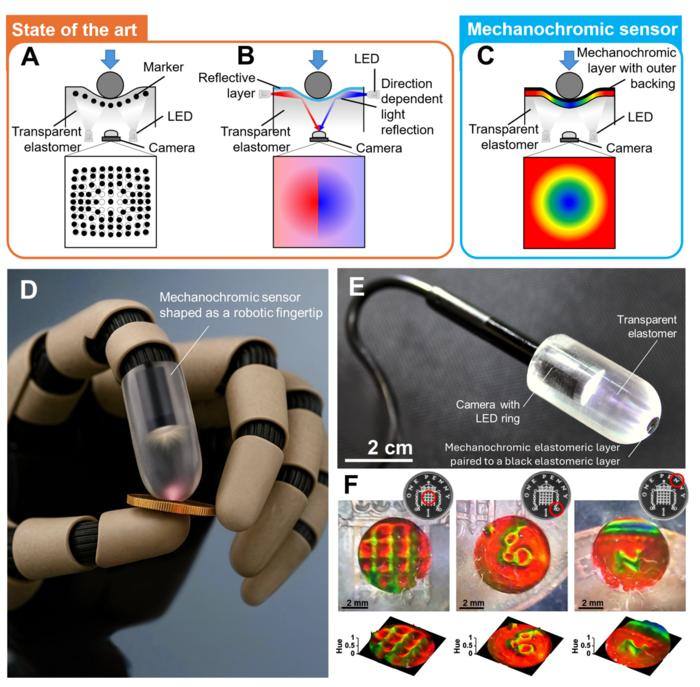
В отличие от традиционных тактильных датчиков, которые полагаются на встроенные массивы сенсоров, новая система интегрирует сенсорную функцию непосредственно в материал: механическое взаимодействие преобразуется в цветовое поле, а данные считываются с помощью недорогой USB-камеры. Команда представила первое в этой области решение реального времени. Джакомо Сассо отмечает, что человеческая рука содержит более 10 000 механорецепторов, и существующие технологии с трудом позволяют создать массивы датчиков аналогичной плотности; данный проект переносит сенсорную функцию на сам материал, упрощая архитектуру системы и генерируя богатые карты давления.
Соавторы проекта из Флорентийского университета, Триестского университета и Трентского университета (Италия) единодушны во мнении, что преимущество информации заключается в том, что она уже содержится в световом сигнале, и нет необходимости реконструировать тактильные ощущения — их можно наблюдать напрямую. Профессор Джеймс Басфилд (James Busfield) заявил: «Вы больше не реконструируете осязание, вы наблюдаете его напрямую». Проект направлен на решение давнего компромисса в области визуального тактильного восприятия: системы с высоким разрешением требуют больших вычислительных затрат, а быстрые системы жертвуют пространственной детализацией. Исследование объединяет области мягкой робототехники и материаловедения, опираясь на сотрудничество профессора Федерико Карпи (Federico Carpi) из Флорентийского университета и профессора Басфилда, и предлагает механохромные материалы в качестве нового направления исследований, где сам материал становится сенсорной средой, напрямую кодируя механическое взаимодействие в видимый световой сигнал, а не полагаясь на микроэлектронные компоненты для интерпретации деформации.










