Репортаж от Wedoany,Исследовательская группа из Международного института информационных технологий в Хайдарабаде (IIIT-H) обнаружила, что существующие камеры ИИ для контроля дорожного движения имеют системные недостатки при обнаружении мотоциклистов, корень которых кроется в форме ограничивающих рамок, используемых для идентификации объектов. Для решения этой проблемы команда предложила трапециевидную ограничивающую рамку, которая повысила точность обнаружения шлемов с 66,25% до 97,08%, а точность обнаружения перегрузки — с 36,70% до 78,34%.
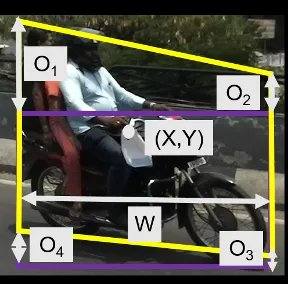
Традиционные системы обнаружения объектов компьютерного зрения полагаются на прямоугольные ограничивающие рамки, которые эффективны для обычных транспортных средств, таких как автомобили и грузовики. Однако для мотоциклов, особенно при съемке сверху, распространенной в камерах дорожного движения, контур мотоциклиста и мотоцикла имеет трапециевидную форму с широким основанием и узким верхом. При использовании прямоугольной рамки, если она слишком плотная, она обрезает руль или голову мотоциклиста — ключевые области для определения ношения шлема; если слишком свободная, она захватывает фон, что приводит к путанице модели между соседними транспортными средствами. Этот сбой называется «ложным немаксимальным подавлением» и особенно заметен в сценариях с высокой плотностью мотоциклов и хаотичным движением.

Исследовательскую группу возглавил Аман Гоял, в состав вошли Дев Агарвал, Анбумани Субраманиан, К.В. Джавахар, Рави Киран Сарвадевабхатла из IIIT-H, а также Рохит Салуджа из IIT Кхарагпур и IIT Манди. Исследование было представлено на семинаре CVPR 2022 по восприятию в неконтролируемых средах и ввело новый геометрический примитив под названием «трапециевидная граница экземпляра вождения» для замены прямоугольных рамок. Эта трапеция определяется четырьмя параметрами смещения, что позволяет ее границам соответствовать фактическому физическому контуру мотоцикла, наблюдаемому с угла съемки. Это нововведение было запатентовано в США (USPTO US 12,315,264, выдан в мае 2025 года) и принадлежит исследовательскому центру iHub-Data при IIIT Хайдарабад.
Система обучена на расширенной версии Индийского набора данных вождения (IDD), размеченной по трем категориям: шлем надет, шлем не надет и трапециевидная граница экземпляра вождения. Для решения проблемы затенения пассажиров на заднем сиденье исследовательская группа заимствовала технику «амодального регрессора» из исследований обнаружения пешеходов, впервые применив ее в конвейере для мотоциклов. Этот регрессор способен генерировать полные прогнозируемые границы для блока мотоциклист-мотоцикл, надежно определяя количество пассажиров даже при частичном визуальном затенении. В обучении также использовался метод «курикулумного обучения», который сначала обрабатывает простые случаи, а затем переходит к сложным, решая проблему перекрытия категорий.

Конвейер исследовательской группы был освещен в отраслевых СМИ и в настоящее время участвует в разработке в рамках процесса автоматической выдачи штрафов городской полицией Индии. Индийский проект «Умные города» включает более 100 городов с интегрированными центрами управления и контроля (ICCC), которые являются потенциальными местами развертывания автоматических систем контроля дорожного движения. По данным Всемирного банка, дорожно-транспортные происшествия ежегодно обходятся Индии в 3–7% ВВП, и в 2022 году Всемирный банк выделил 250 миллионов долларов специально на инфраструктуру безопасности дорожного движения в Индии.
Значение этого исследования выходит за пределы Индии. В исследовании отмечается, что системы компьютерного зрения для глобального управления дорожным движением в основном построены на основе западных дорог и моделей движения, в то время как модели с высокой плотностью и смешанным движением более распространены в развивающихся странах мира. Последующая работа команды расширяет систему от стационарных камер высокого расположения до видеорегистраторов; их статья 2025 года «DashCop» демонстрирует автоматическую генерацию электронных штрафов на основе видео с видеорегистраторов для обеспечения контроля на всей дорожной сети.

Исследовательская группа считает, что инженерное узкое место — достижение точности обнаружения, заслуживающей доверия, — для обнаружения нарушений мотоциклистов и аналогичных сценариев с высокой плотностью уже решено. Дальнейшего изучения требует то, как будут развиваться правовые и нормативные рамки, касающиеся доказательств, созданных ИИ.



Данный материал скомпилирован платформой Wedoany. При цитировании материалов, созданных с помощью искусственного интеллекта (ИИ), необходимо обязательно указывать источник — «Wedoany». В случае выявления нарушения прав или иных проблем просим своевременно информировать нас. Сайт оперативно внесёт изменения или удалит материал.Электронная почта: news@wedoany.com