

Обследование мостов — одна из самых трудоемких и опасных задач в обслуживании гражданской инфраструктуры во всем мире. В слепых зонах, таких как внутренние полости балочных пролетных строений, опорные площадки мостовых опор и подмостовые водопропускные трубы, где отсутствует сигнал GPS, традиционный ручной осмотр сталкивается с давними проблемами: высокими рисками для персонала, многочисленными визуальными мертвыми зонами и низкой эффективностью. Совместное исследование Чжэцзянского университета, Ханчжоуского университета электронных наук и технологий и других команд предлагает систему QRIVAS (четырехногая роботизированная интеллектуальная система визуального сбора данных), которая позволяет роботу, полностью независимо от карт и априорной информации об окружающей среде, осуществлять автономное исследование, точную идентификацию и полный сбор изображений ключевых элементов моста. В симуляционной среде показатель успешной навигации достиг 100%, а при реальной инспекции элементов моста средний показатель успешного выполнения задач навигации составил 96,7%.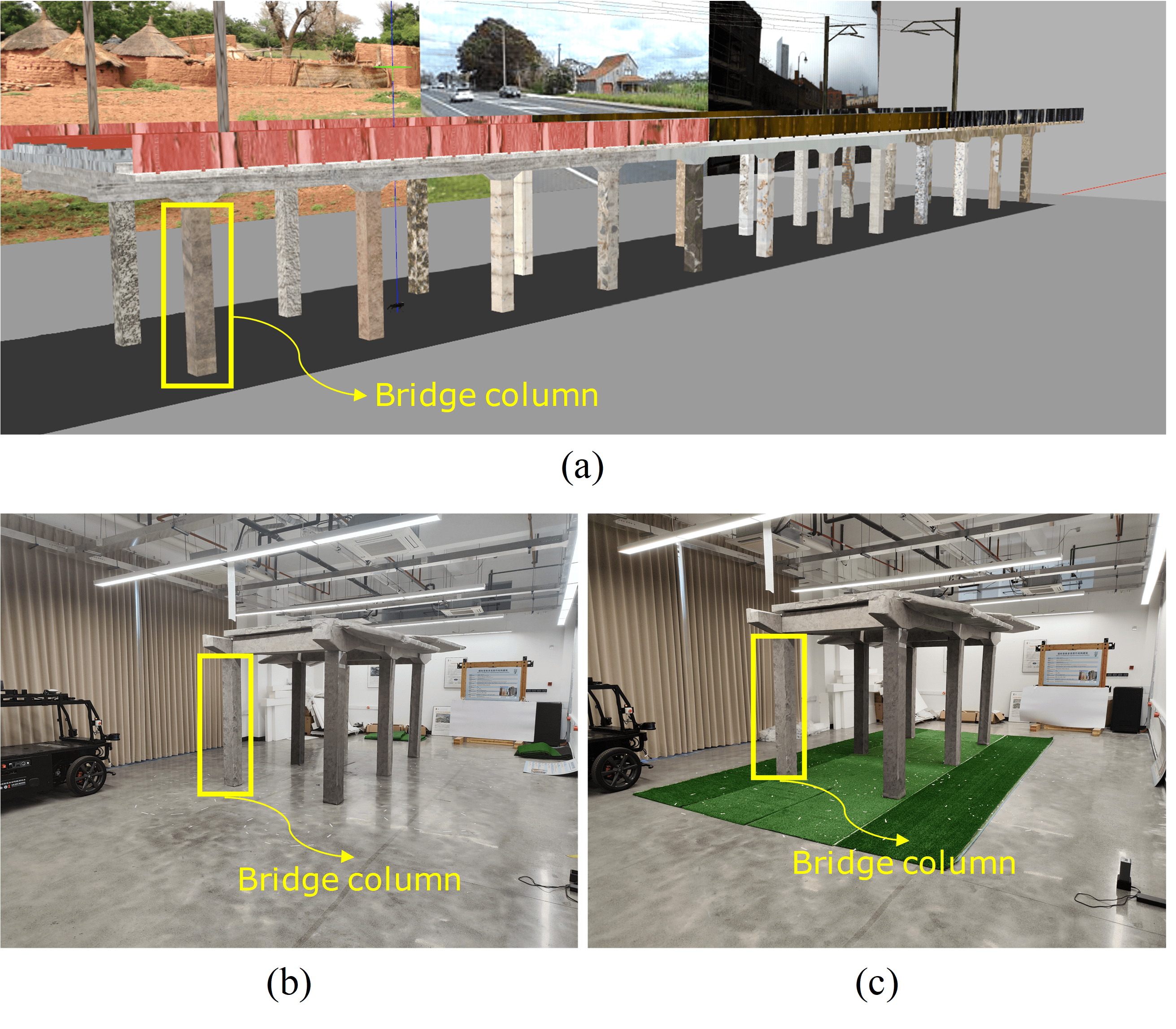
«Дилемма слепых зон» при обследовании мостов
Мосты являются ключевыми узлами транспортной системы, и мониторинг их структурного состояния напрямую связан с общественной безопасностью и сроком службы сооружений. Ключевые элементы, такие как опоры, ригели и нижние поверхности балок, часто находятся внутри балочных пролетов, у основания опор или в подземных водопропускных трубах, где сигнал GPS недоступен, отсутствуют текстурные признаки и стабильное освещение. Традиционный ручной осмотр требует возведения лесов, использования высотных рабочих платформ или даже промышленного альпинизма, что сопряжено с огромными рисками для безопасности; например, однократный ручной осмотр туннеля длиной около 11 км занимает почти 22 часа. В то же время, беспилотные летательные аппараты (БПЛА) под мостами и в замкнутых пространствах также не могут стабильно работать из-за отсутствия GPS и турбулентных воздушных потоков.
Существующие решения для роботизированной инспекции в основном полагаются на предварительно построенные высокоточные карты. Однако в неизвестной среде без априорной информации (например, при первичном обследовании после строительства нового моста или срочной инспекции моста после катастрофы) стоимость предварительного картографирования чрезвычайно высока, цикл долог, а иногда это и вовсе невозможно. Таким образом, вопрос о том, как обеспечить автономную навигацию и высокоточный визуальный сбор данных в экстремальных условиях — без карты, без GPS, со слабой текстурой и низкой освещенностью — стал ключевой проблемой, требующей решения на стыке гражданского строительства и робототехники.
Когда четвероногий робот учится «ощупывать слона»
20 мая 2026 года Чжэцзянский университет совместно с Ханчжоуским университетом электронных наук и технологий, Шанхайской компанией по строительным проверкам и тестированию и другими организациями опубликовал в Journal of Field Robotics результаты исследования, впервые представив систему QRIVAS — автономную платформу для четвероногого робота, объединяющую трехмерный LiDAR SLAM и семантическую сегментацию в реальном времени. Система, не полагаясь на предварительные карты, обеспечивает автономное исследование, точную идентификацию и полный сбор изображений ключевых элементов моста, заполняя технический пробел в области автономной навигации в экстремальных условиях для интеллектуальной инспекции в гражданском строительстве.
Ключевое преимущество 1: 3D LiDAR SLAM для автономной навигации и картографирования
Исследовательская группа установила на платформу четвероногого робота лидар Ouster OS1-64. С помощью технологии 3D LiDAR SLAM (одновременная локализация и построение карты) робот в реальном времени воспринимает окружающую среду в условиях отсутствия сигнала GPS и слаботекстурированной поверхности, одновременно строя высокоточную трехмерную карту облака точек и вычисляя собственное местоположение. Это первый случай глубокой интеграции SLAM-навигации и семантического распознавания четвероногим роботом в условиях гражданского строительства, что позволило преодолеть проблему дрейфа локализации, вызванную слабой текстурой и низкой освещенностью в замкнутых пространствах, таких как внутренние полости балочных пролетов.
Ключевое преимущество 2: Семантическая сегментация в реальном времени позволяет роботу «понимать» опоры моста
Одновременно с навигацией в реальном времени команда развернула эффективную и легковесную сеть семантической сегментации в реальном времени для попиксельной семантической разметки ключевых элементов, таких как опоры, ригели и нижние поверхности балок, в облаке точек LiDAR. QRIVAS глубоко связывает планирование маршрута навигации с распознаванием элементов, благодаря чему робот не только «знает, где он находится», но и «знает, что снимать» и «с какого ракурса снимать».
Такая конструкция позволяет роботу при исследовании неизвестной среды динамически корректировать положение для наблюдения, обеспечивая многоракурсную и полную съемку целевых элементов, что устраняет хроническую проблему слепых зон при съемке, возникающую при традиционной инспекции по фиксированному маршруту из-за сложной формы конструкций.
Ключевое преимущество 3: Автономная декомпозиция задач без предварительной карты
Ключевой прорыв QRIVAS заключается в полном отказе от зависимости от предварительных карт. Система разбивает сложную задачу инспекции элементов моста на три автономно выполняемые подзадачи: исследование пространства (робот самостоятельно планирует маршрут покрытия неизвестной области), идентификация элементов (определение местоположения и ориентации целевого элемента на основе результатов семантической сегментации) и сбор информации (автоматическая корректировка позиции и положения для сбора данных изображений ключевых частей элемента). Робот строит карту синхронно с выполнением задачи, без какого-либо вмешательства человека или предустановленных траекторий.
Ключевое преимущество 4: Высокая робастность в экстремальных условиях рельефа и при жестких допусках
Команда провела системную валидацию в симуляционной среде, имитирующей бетонный железнодорожный виадук, и на масштабной (1:3) физической модели мостовой опоры. Результаты экспериментов имеют этапное значение: в симуляционной среде QRIVAS достиг 100% успешной автономной навигации; на реальной модели опоры при повторных инспекциях шести отдельных опор средний показатель успешного выполнения задач навигации составил 96,7%.
Особенно важно, что система сохраняла стабильность в двух экстремальных рабочих условиях: во-первых, на ровной бетонной поверхности ее робастность была подтверждена строгими испытаниями с двумя допустимыми радиусами навигационного допуска — 25 см и 50 см, превзойдя существующие технические решения; во-вторых, она успешно завершила всю автономную инспекцию на типичной слабой и неровной площадке из грубого искусственного газона, доказав превосходную способность четвероногого робота адаптироваться к рельефу.
От «человека в тупике» к «роботу в тупике»
Техническая сложность обследования мостов заключается не только в том, чтобы «увидеть», но и в том, чтобы «попасть внутрь» и «точно снять». Сложная обстановка в месте соединения основания опоры с землей и крайне ограниченное пространство в зоне устоев долгое время сдерживали развитие автоматизированного контроля.
Технический подход QRIVAS, основанный на интегрированной конструкции совместного восприятия и принятия решений роботом, реализует замкнутый цикл «движение — это картографирование, картографирование — это решение»: с каждым шагом робота данные сканирования LiDAR в реальном времени поступают в модуль SLAM, обновляя локальную карту; модуль семантической сегментации идентифицирует на карте целевые элементы; модуль планирования маршрута на основе этого корректирует следующий ракурс наблюдения и точку опоры. Этот механизм принятия решений, обновляемый в реальном времени и управляемый задачами, позволяет QRIVAS выполнять полную инспекцию в среде с нулевой априорной информацией, предоставляя воспроизводимую системную основу для «автономного исследования неизвестной среды» в области гражданского строительства.
Начиная с опор моста, охватывая инспекцию всего моста и всей инфраструктуры
1. Преодоление мертвых зон традиционной инспекции для обеспечения «беспропускного» контроля опор и внутренних полостей балочных пролетов
Инспекция пространства под балочными пролетами и опорами моста является самой сложной и опасной. Успешная валидация QRIVAS предлагает автоматизированное решение для контроля этих двух наиболее проблемных типов элементов. Робот может проникать в узкие полости высоких балочных пролетов, автономно строить карту, определять местоположение и собирать изображения нижней поверхности балок в полностью темном, лишенном какой-либо текстуры внутреннем пространстве, полностью заменяя традиционные высотные работы человека.
2. От «инспекции одиночным роботом» к «скоординированному рою»: наземно-воздушная интеллектуальная система инспекции
QRIVAS и инспекция с помощью БПЛА образуют идеальную техническую взаимодополняемость. Пространства под мостом и замкнутые полости, недоступные для БПЛА, детально обследуются четвероногим роботом; БПЛА, в свою очередь, отвечают за быстрое создание макроскопической трехмерной карты моста, предоставляя роботу глобальную навигационную информацию. Их совместная работа может сформировать для крупных мостов комплексную интеллектуальную систему контроля без слепых зон — от макро- до микроуровня.
3. Аварийно-восстановительные работы при катастрофах: немедленное проникновение в зоны моста после землетрясения, недоступные для работы
В экстремальных сценариях, таких как после землетрясения или наводнения, мост поврежден, а состояние конструкций неизвестно, и вход человека сопряжен с огромным риском для безопасности. Способность QRIVAS к автономной работе без карты представляет уникальную ценность в чрезвычайных ситуациях после катастроф: система может быть немедленно развернута в совершенно незнакомой спасательной среде, быстро собирать изображения повреждений конструкций и передавать их обратно, предоставляя критически важную информацию из первых рук для принятия решений по аварийному ремонту.
4. Перенос технологий: от мостов к туннелям, подземным коммуникациям и сверхвысоким зданиям
Базовая техническая структура системы (3D LiDAR SLAM + семантическая сегментация в реальном времени + автономная декомпозиция задач) обладает чрезвычайно высокой способностью к переносу между различными сценариями. При инспекции туннелей четвероногий робот может автономно перемещаться в длинных туннелях без GPS для сбора изображений обделки; в городских подземных комплексных коммуникационных коллекторах (таких как информационный коллектор «подземного города» в новом районе Сюнъань) он может выполнять полностью автономную инспекцию в неосвещенных пространствах с отсутствием сигнала; а также выполнять аналогичные задачи в ограниченных пространствах, таких как высотные опоры и крупные резервуары, значительно расширяя границы применения БПЛА и роботизированной инспекции.
От «опасного человека» к «умной собаке»
Глубинная ценность этого исследования заключается в переосмыслении парадигмы автоматизации в обследовании гражданских сооружений. С момента зарождения современного мостостроения «возведение лесов», «высотные работы» и «проникновение в узкие пространства» всегда были неизбежной ценой за контроль состояния конструкций. Успешная валидация QRIVAS доказывает, что в четырех самых жестких условиях — без карты, без GPS, со слабой текстурой и низкой освещенностью — четвероногий робот все же способен самостоятельно выполнять высококачественные инспекционные задачи. Это знаменует собой ключевой шаг в историческом переходе от «человеко-ориентированного» к «интеллектуально-роботизированному» подходу в обследовании гражданских сооружений.