Репортаж от Wedoany,Компания GENISOM AI продемонстрировала на ICRA 2026 в Вене свою полную экосистему воплощённого интеллекта, ядром которой является четвероногий робот GENISOM M1. Система включает собственные модули суставных приводов, симуляционную инфраструктуру MATRiX, автономную навигационную систему RoamerX и фреймворк AI-агентов SomaMind.

ICRA — одна из ведущих мировых конференций по робототехнике и автоматизации, объединяющая исследователей, инженеров и отраслевых партнёров со всего мира. Для GENISOM AI участие в Вене стало первой значимой презентацией на этой конференции, где компания представила не единичный продукт, а полную линейку решений, охватывающую как аппаратное, так и программное обеспечение. На выставке GENISOM AI показала роботизированные платформы GENISOM M1, L1, L1-W и L1 EDU, а также манипуляторный модуль и собственные модули суставных приводов CHAMP.
Участники получили возможность лично ознакомиться с аппаратными и программными компонентами для сквозной разработки — от отдельных приводов до полностью автономных роботизированных систем.
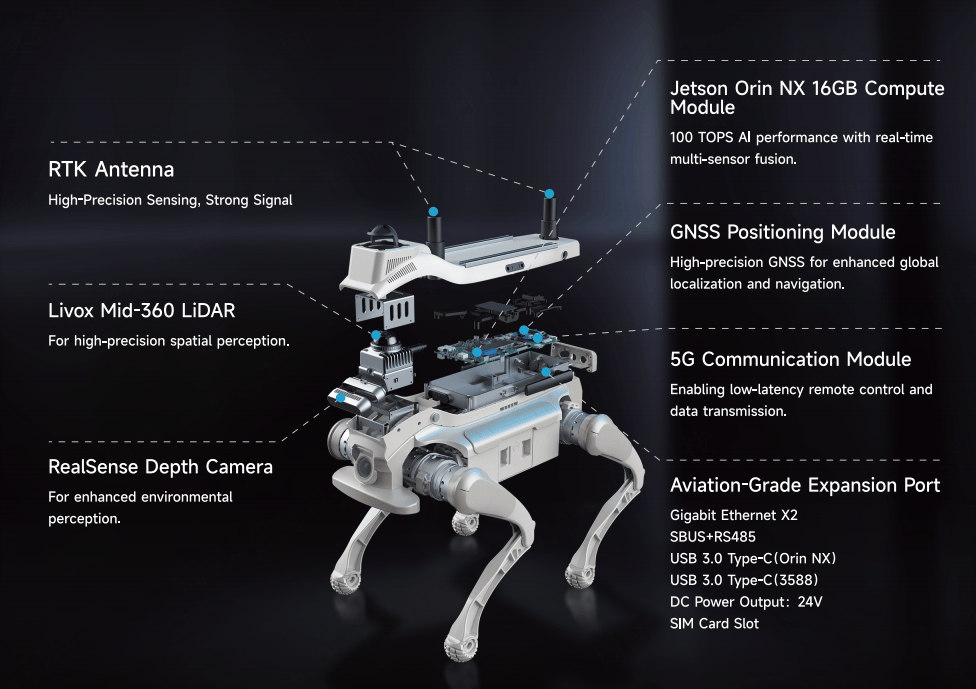
Четвероногий робот GENISOM M1 стал главным продуктом выставки. Он позиционируется как первый в отрасли лёгкий, высоконагруженный и полностью защищённый четвероногий робот с соотношением полезной нагрузки к собственному весу 1:1, способный непрерывно переносить груз до 30 кг. Робот имеет степень защиты IP67, работает в диапазоне температур от -20 до 55 °C, развивает максимальную колёсную скорость 8 м/с, преодолевает препятствия высотой до 80 см и подъёмы с углом наклона до 45 градусов. GENISOM M1 оснащён собственными модулями суставных приводов CHAMP P85MAX-S с пиковым крутящим моментом 180 Н·м. Два аккумулятора с возможностью горячей замены обеспечивают до пяти часов работы без нагрузки, а 15 открытых интерфейсов поддерживают интеграцию с внешними датчиками, системами питания и управляющей электроникой. Эти характеристики делают робота пригодным для инспекции электросетей, мониторинга промышленных объектов, аварийно-спасательных работ, логистики и охранного патрулирования.

На программном уровне GENISOM AI представила симуляционную платформу MATRiX — среду симуляции нового поколения с открытым исходным кодом, объединяющую физический движок MuJoCo с Unreal Engine 5 и интегрирующую нативные интерфейсы ROS2 для многодатчикового потока данных и взаимодействия алгоритмов. Платформа построена на основе цикла данных REAL2SIM2REAL и поддерживает бесшовное повторное использование сценарных активов (таких как 3D-гауссовы всплески, генеративные гауссовы сцены, облака точек и сеточные модели), что снижает затраты на аппаратные испытания и сокращает время перехода от симуляции к физическому развёртыванию. Разработчики могут получить доступ к MATRiX по адресу https://github.com/zsibot/matrix. Интеллектуальная навигационная платформа RoamerX интегрирует картографирование в реальном времени с использованием лидаров, IMU и визуальных датчиков, обеспечивая сантиметровую локализацию с помощью модели дескрипторов «визуал-лидар» с компенсацией дрейфа, а также генерирует эффективные траектории в динамических средах с использованием пространственно-временных алгоритмов планирования. Данное решение было проверено как в симуляции, так и в публичных реальных демонстрациях. Фреймворк управления всем телом позволяет роботу с четырёхногим манипулятором одновременно отслеживать скорость корпуса и положение конечного эффектора; эта стратегия обучается в симуляции с помощью обучения с подкреплением и имитационного обучения, а затем переносится на физическое оборудование. Система физического и интерактивного агента SomaMind соединяет высокоуровневый AI-рассуждение с физическим выполнением робота через слой оркестровки навыков на основе деревьев поведения, разбивая сложные пользовательские команды на последовательности атомарных навыков, охватывающих навигацию, восприятие, манипуляции и коммуникацию, и позволяя разработчикам расширять систему путём написания переиспользуемых навыков поверх существующих модулей роботизированных возможностей.
Технологии GENISOM AI уже развёрнуты в проектах по инспекции электросетей, охранному патрулированию, аварийно-спасательным работам, логистическим перевозкам, мониторингу промышленных цехов, а также в образовательных и исследовательских проектах. Компания достигла рубежа в 10 000 произведённых и поставленных единиц на платформе четвероногих роботов. Её завод в Сучжоу (Китай) эксплуатирует автоматизированные сборочные линии в рамках системы менеджмента качества, сертифицированной по стандартам ISO 9001, ISO 45001 и ISO 14001. Команда Манчестерского университета, используя оборудование GENISOM AI, заняла первое место на соревновании четвероногих роботов IROS 2025 (одном из самых строгих бенчмарков в области шагающих роботов), подтвердив надёжность роботизированной системы в условиях нагрузок.

Компания GENISOM AI, основанная в декабре 2023 года со штаб-квартирой в Пекине, является компанией, разрабатывающей полностековые воплощённые роботизированные платформы, включая четвероногих и человекоподобных роботов. Она также поддерживает партнёров по цепочке создания стоимости в робототехнике через собственные модули суставных приводов, кастомизацию платформ, ODM и производственную поддержку, инструментарий программного обеспечения и ресурсы для вторичной разработки. В компании работает около 400 сотрудников, из которых примерно 70% заняты в исследованиях и разработках. Совокупный объём производства и поставок на платформе четвероногих роботов превысил 10 000 единиц, а сферы применения охватывают промышленную инспекцию, охранное патрулирование, аварийно-спасательные работы, а также исследования и образование.
Данный материал скомпилирован платформой Wedoany. При цитировании материалов, созданных с помощью искусственного интеллекта (ИИ), необходимо обязательно указывать источник — «Wedoany». В случае выявления нарушения прав или иных проблем просим своевременно информировать нас. Сайт оперативно внесёт изменения или удалит материал.Электронная почта: news@wedoany.com