

По мере того как глубина добычи угля в Китае逐年 увеличивается, подземное рабочее пространство становится все более ограниченным. Традиционные жесткие манипуляторы и колесные или гусеничные роботы из-за своих больших габаритов и недостаточной гибкости с трудом справляются с задачами инспекции, технического обслуживания и спасательных работ в таких сложных зонах, как узкие штреки, обрушенные щели и кабельные траншеи. Исследовательская группа из China Coal Technology & Engineering Group, Сианьского университета науки и технологий и других организаций опубликовала важный обзор в ведущем китайском журнале в области международных горных технологий «Coal Science and Technology», в котором систематически рассматриваются теоретические основы, ключевые технологии и перспективы инженерного применения змеевидных роботов для подземных работ в угольных шахтах. Как новый тип бионического робота, змеевидный робот преодолевает ограничения движения традиционных жестких манипуляторов, сочетая высокую гибкость с адаптацией к взрывозащищенным условиям угольной шахты, и демонстрирует значительный потенциал применения в таких сценариях, как подземная инспекция, техническое обслуживание оборудования и аварийно-спасательные работы. Данная статья, посвященная этому прорывному исследованию, глубоко анализирует его технические особенности и будущие направления.
Бионический прорыв: технологический скачок от «копирования структуры» к «управлению движением»
Основной вклад данного исследования заключается в создании теоретической системы ключевых технологий для змеевидных роботов, ориентированных на ограниченное пространство угольных шахт, что разрушает парадигмальные ограничения традиционного мобильного оборудования, характеризующегося «жестким движением и единственной функцией».
Классификация конфигураций и границы применимости: точный портрет трех типов
Исследовательская группа, исходя из структурной классификации и характеристик, систематически обобщила преимущества и границы применимости трех основных конфигураций змеевидных роботов: дискретной, извивающейся и непрерывной. Дискретные роботы состоят из последовательно соединенных модульных блоков, обладают высокой ремонтопригодностью и удобны в обслуживании; извивающиеся роботы, основанные на конструкции с телескопическими шарнирами, позволяют достичь высокой точности позиционирования; непрерывные роботы обладают большей общей гибкостью и могут проникать в сложные изогнутые каналы. Для различных сценариев ограниченного пространства, таких как выработанное пространство угольной шахты, дегазационные штреки и внутренние полости дренажных труб, каждая из трех конфигураций имеет свои акценты, предоставляя четкую карту для выбора оборудования в различных рабочих условиях.
Моделирование кинематики и динамики: расшифровка кода управления высокоизбыточными системами
На теоретическом уровне исследовательская группа систематически проанализировала методы моделирования кинематики и динамики высокоизбыточных систем. Для решения проблем управления, возникающих из-за динамически неопределенной среды и взаимодействия со сложным рельефом, особо подчеркивается необходимость нелинейного управления, робастного управления и механизмов работы в деградированном режиме. Благодаря созданию математических моделей, связывающих углы суставов, скорость колес и препятствия на местности, в сочетании с алгоритмами движения, использующими избыточные степени свободы, змеевидный робот способен выполнять более плавные и стабильные шаги ползания и поворота в зонах с очень низкими препятствиями, таких как наклонные штреки и кабельные траншеи.
Мультимодальная сенсорная интеграция и навигация в условиях ограниченной связи: продвижение «без окон» в густом тумане
Подземное пространство угольной шахты является типичной средой с ограниченными коммуникациями, где пыль, водяной туман и сильные магнитные поля создают серьезные помехи для традиционных беспроводных сигналов. Исследовательская группа обобщила инженерную применимость схем мультимодальной сенсорной интеграции с использованием лидаров, камер глубины, инерциальных измерительных блоков и других датчиков, что позволяет преодолеть ограничения восприятия, присущие одиночным сенсорам. В то же время, использование встроенных систем с возможностью вычислений на конечных устройствах обеспечивает автономную навигацию и планирование пути в локальных условиях низкой скорости на периферии, что значительно повышает способность робота к обнаружению и обходу препятствий в условиях «слепых зон».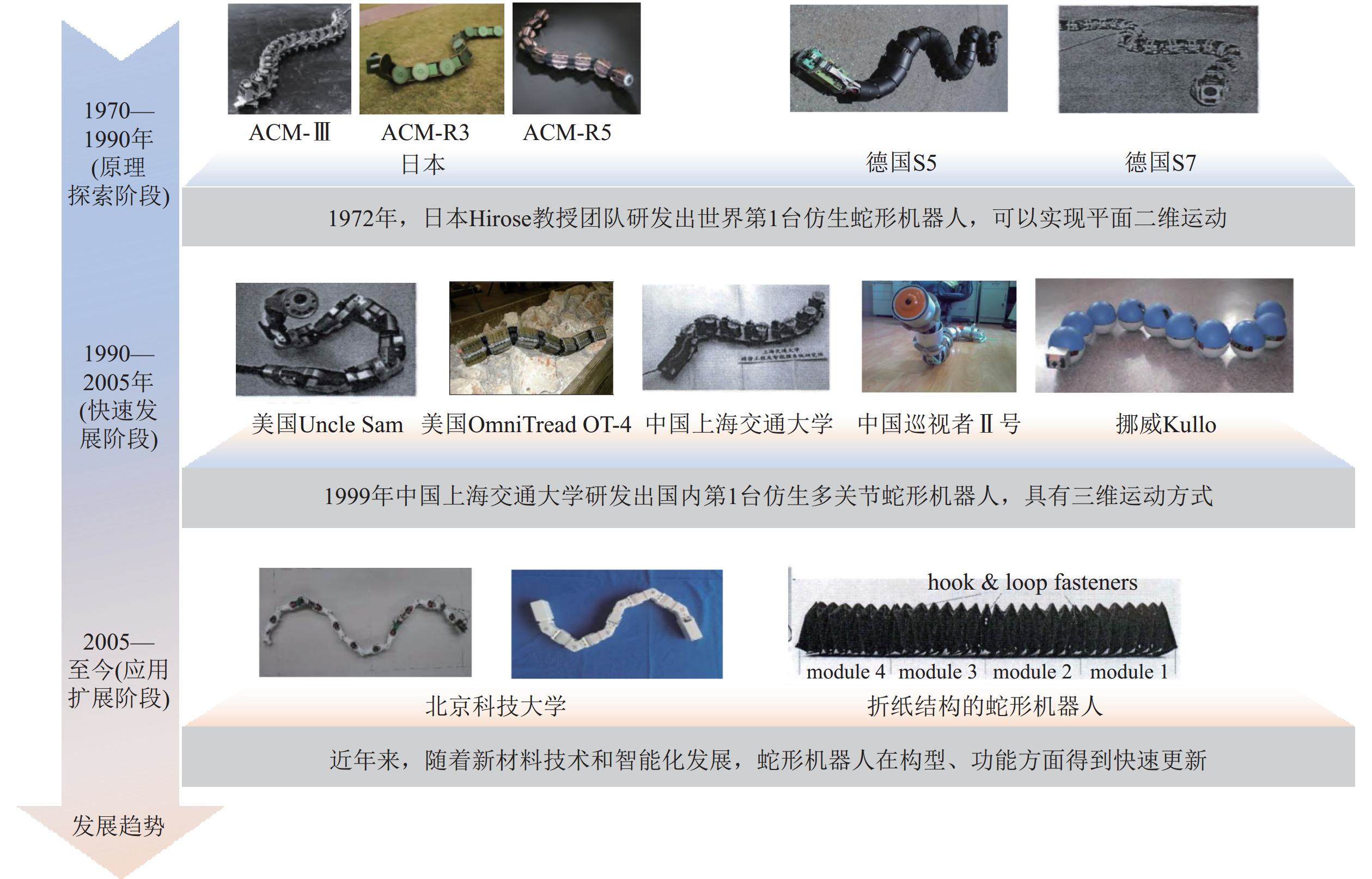
Преодоление узких мест: для промышленного применения необходимо преодолеть «три большие горы»
Признавая огромный потенциал применения, исследование также прагматично указывает на основные узкие места, с которыми в настоящее время сталкиваются змеевидные роботы при широкомасштабном промышленном внедрении в угольных шахтах:
Инженерное противоречие между взрывозащитой и легкостью: риск взрыва метана в угольных шахтах высок, а взрывозащищенные корпуса часто значительно увеличивают вес и объем машины, что противоречит естественной потребности в легкости и высокой гибкости. Достижение предельно легкой конструкции при обеспечении искробезопасности является первым порогом для инженерной реализации.
Стабильная интеграция мультисенсорной информации: в условиях тусклого освещения и запыленности под землей уровень достоверности данных от разных датчиков в различных средах сильно различается, что приводит к недостаточной стабильности и согласованности мультисенсорной интеграции восприятия.
Высокоточное позиционирование и автономное принятие решений в условиях ограниченной связи: в глубоких подземных пространствах, где отсутствует покрытие сигналом GPS или даже UWB, достижение высокоточного позиционирования и принятие автономных решений с учетом ограничений риска является критической проблемой, сдерживающей возможность независимой работы.
От «интеллекта в одной точке» к «системной интеграции» — общая тенденция
Несмотря на вышеуказанные проблемы, предложенный в исследовании ключевой технологический маршрут указывает направление для следующего этапа конкуренции в области интеллектуализации угольных шахт. Заглядывая в будущее, с созданием новых платформ, таких как «Пилотная база воплощенного интеллекта роботов в регионе Большого залива Гуандун-Сянган-Аомэнь» при China Coal Research Institute, и совершенствованием сопутствующих сред для тестирования и моделирования, промышленное внедрение змеевидных роботов выходит на скоростную магистраль.
Круглосуточная инспекция в ограниченном пространстве: видеть глубже и точнее
В потенциально опасных точках, труднодоступных для человека, таких как конвейерные штреки, закрытые трубопроводы, края выработанного пространства, змеевидный робот может нести камеры высокого разрешения, тепловизоры и различные газовые датчики для выполнения автоматизированных циклических инспекций. Исследовательская группа отмечает, что использование существующих исторических данных для создания большой базы данных в сочетании с алгоритмами ИИ позволит заблаговременно предупреждать о перегреве оборудования или аномалиях содержания газа, совершив переход от «инспекции» к «интеллектуальной проверке».
Аварийно-спасательные работы в сложных условиях: быть первыми и спасать жизни
В случае катастрофы змеевидный робот благодаря своему тонкому корпусу и высокогибким шарнирам может проникать в щели между обломками после мощного взрыва газа или прорыва воды, опережая спасателей для обнаружения признаков жизни и развертывания временного аварийного ретранслятора связи. Это уникальное преимущество, с которым не могут сравниться никакие другие жесткие роботы или ручные методы спасения.
Вспомогательные операции на безлюдных комплексных забоях: интеграция человека и машины
В рамках общей тенденции постепенного перехода к интеллектуальной и безлюдной добыче угля, змеевидные манипуляторы будут устанавливаться на проходческие комбайны или гидравлические крепи, выполняя вспомогательную роль благодаря своей миниатюризации и высокой степени свободы при устранении ослабления анкерной крепи, неисправностей кабельных линий или обследовании внутренних конструкций, что значительно снижает риск прямого контакта персонала в опасных зонах.
Построение новой экосистемы «Искусственный интеллект + горное оборудование»
В заключение исследования подчеркивается, что будущий шахтный змеевидный робот будет не просто изолированным передовым аппаратным средством, а должен быть полностью интегрирован в «воплощенную интеллектуальную» систему шахты. Благодаря развертыванию больших моделей в облаке, дистанционному управлению 5G и распределенному планированию задач, один корпус змеевидного робота сможет осуществлять мгновенное обновление моделей и обмен знаниями на разных шахтных терминалах, что значительно повысит эффективность использования и оперативность реагирования оборудования на нескольких шахтах.
Укрепление основ безопасного производства с помощью «гибкого интеллекта»
Глубинная ценность этого исследования заключается в фундаментальном изменении способа взаимодействия человека и машины в подземных пространствах повышенной опасности в Китае. Хотя общее количество аварий на шахтах Китая значительно сократилось, страна все еще находится на ключевом этапе перехода к цели «нулевой смертности и нулевого ущерба». По мере того как ведущие компании, такие как China Coal Technology & Engineering Group, одна за другой представляют змеевидные манипуляторы и разведывательные роботы с собственной интеллектуальной собственностью, а соответствующие национальные проекты под руководством академика Гэ Шижуна углубленно продвигаются, ранее «невозможные» прецизионный ремонт и экстремальные спасательные операции получают реальные прорывные решения.
От прорыва в бионических механизмах до прорыва в сенсорном управлении и далее до прорыва в системной инженерии — змеевидный робот уже стал ключевым полем конкуренции в рамках «глубокой интеграции индустриализации и информатизации угольной промышленности Китая» и «интеллектуального строительства в период 15-й пятилетки». Как говорится в исследовании, будущие прорывы будут сосредоточены на взрывозащищенных легких конструкциях, ориентированных на типичные рабочие сценарии угольных шахт, надежном восприятии в деградированных условиях и автономном управлении с ограничением рисков, что обеспечит стабильную и эффективную основу основного оборудования для интеллектуальной добычи угля.